2018
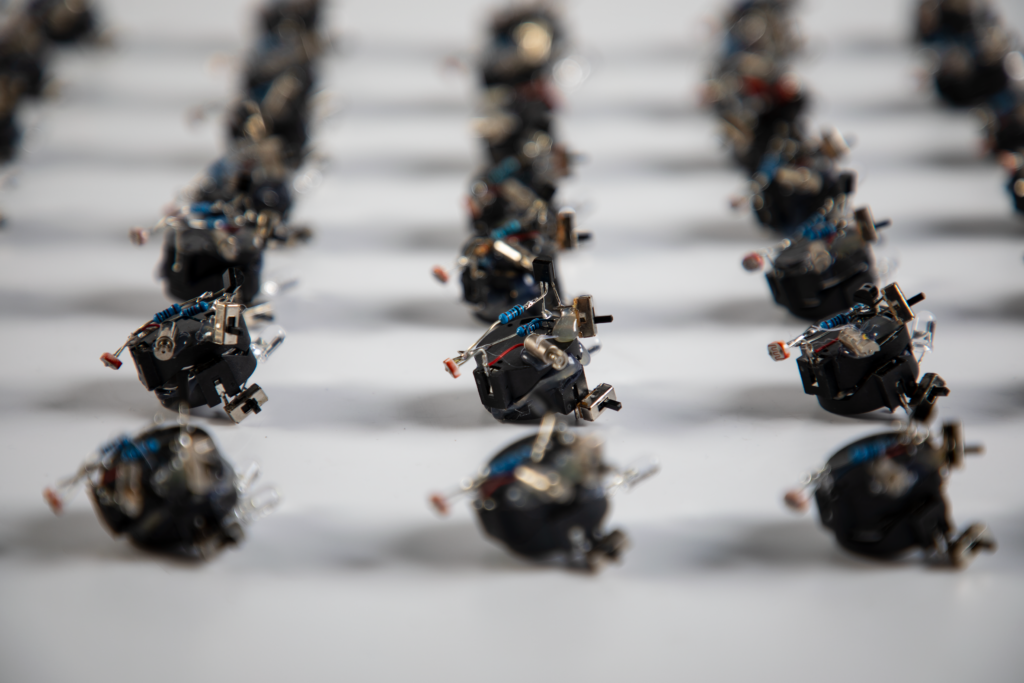
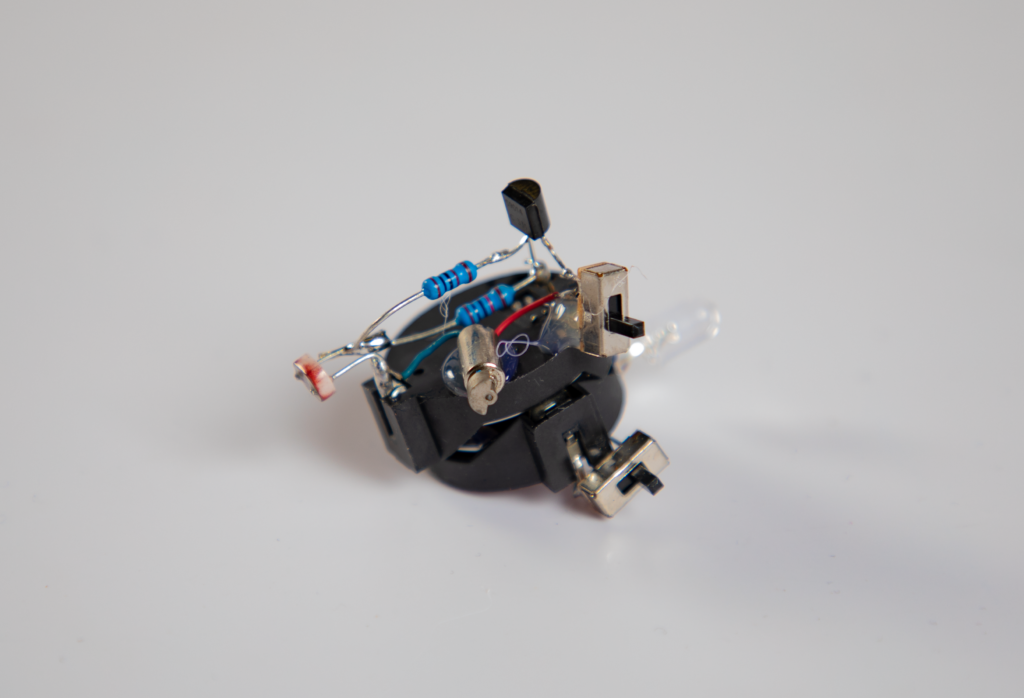
I’ve always been interested in flocking and natural behaviour. Seeing flocks of birds make intriguing shapes without flying into each other is incredible. Even though behaviour is very complex it is actually based on a few simple rules but when people are researching this it is almost always completely simulated in the computer. I wanted to do this in real life so I started out with the paper Valentino Braitenberg. If a robot has a sensor and a source you can create behaviour. For example if the sensor sees light the motor will move faster and therefore create a love reaction. For my installation I created 50 tiny robots. each with a sensor and a light source. If they see each other they start vibrating quicker and so create a complex system.